在上一篇博文里介绍了图像处理初探(一)——图像转换基础及OpenCV应用,本篇在此基础上重点谈图像旋转算法的原理与实现。本文以Android中常见的YUV422I(YUY2)格式为例。
Catalog
通用YUV422I旋转90/270算法
解决思路
实现图像旋转算法的关键在于理解清楚:旋转前后图像格式排列规则之间的联系,这很重要。初步考虑是,旋转90°或270°涉及相邻行列的像素点(最少2*2个像素点),将Y元素转置而UV元素进行适当地转换,UV的转换是重点。强烈建议画出前后的图像排列格式,再找转换关系。
YUV422I旋转90°示意
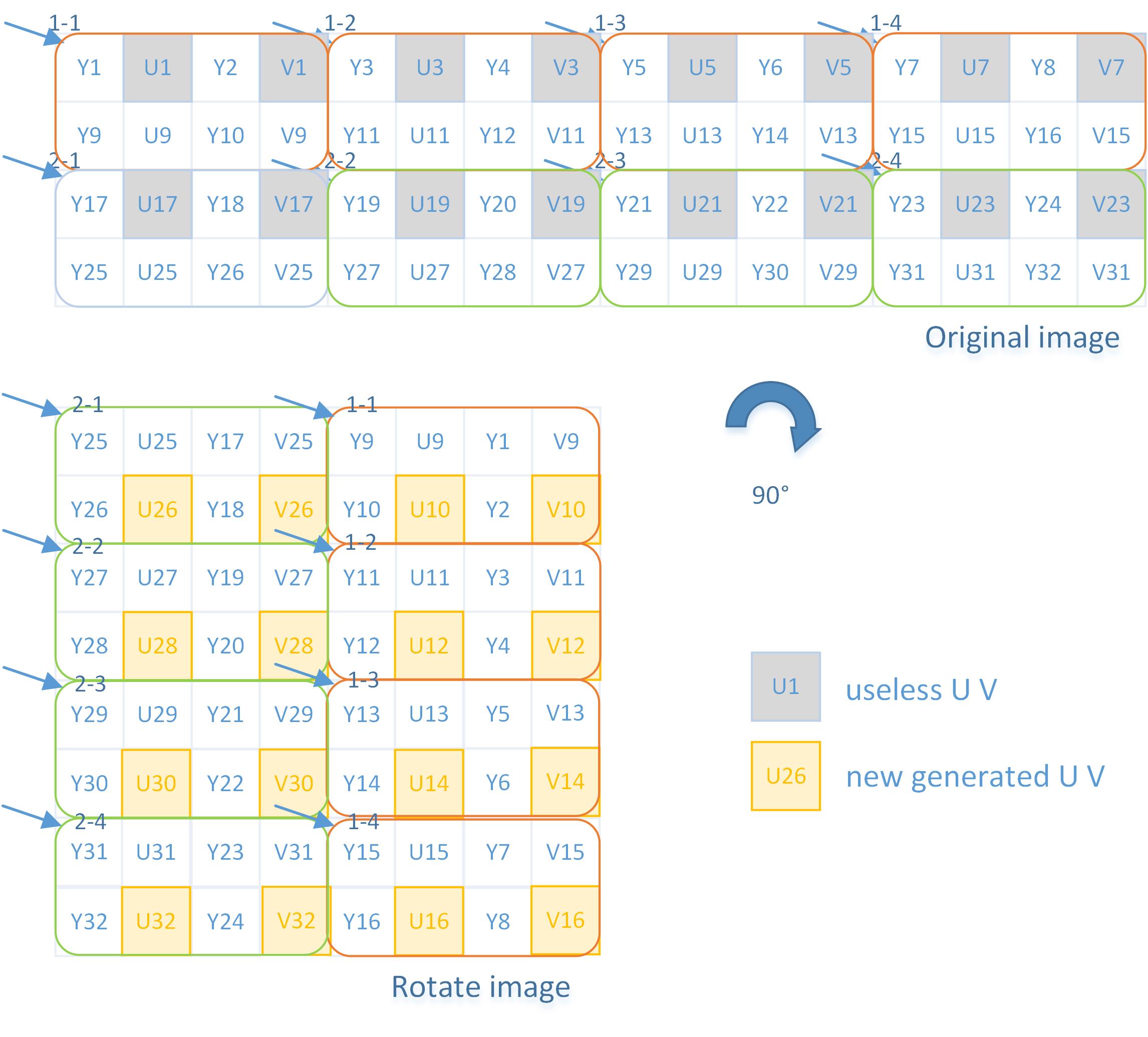
观察旋转前后可得以下几点信息:
- 旋转前的奇数行(以1为初始)中的UV信息都无用;
- 旋转后的偶数行(以1位初始)中的UV信息都是原图中没有的,需要推算;
- 比如,图中的U10、V10需从Y10、U9、V9转换得到,通常思路为:(Y10, U9, V9) -> (R9, G9, B9) -> (U10, V10)
- 所有的Y信息都进行了转置且都有用(亮度信息必然有用);
4*2个YUV信息为旋转算法处理的最小单位;- 旋转前图片格式为
(width * 2) * height,旋转后为(heigh * 2) * width;
旋转90°的C程序框架:
const unsigned char *src_y = src; /* dst_1_1指向旋转前1-1处的指针 */
unsigned char *dst_y = dst_1_1; /* dst_1_1指向旋转后1-1处的指针 */
for (int i = 0; i < height / 2; ++i) { /* 假设一次外循环处理2行YUYV信息 */
src = src_y;
dst = dst_y;
for (int j = 0; j < doublewidth / 4) { /* 假设一次处理每行相邻4个YUYV信息 */
... // 移动Y信息
... // 计算新的UV信息
src += 4; /* 更新内循环的指针 */
dst += doubleheight * 2;
}
src_y += doublewidth * 2; /* 更新外循环的指针 */
dst_y -= 4;
}
YUV422I旋转270°示意
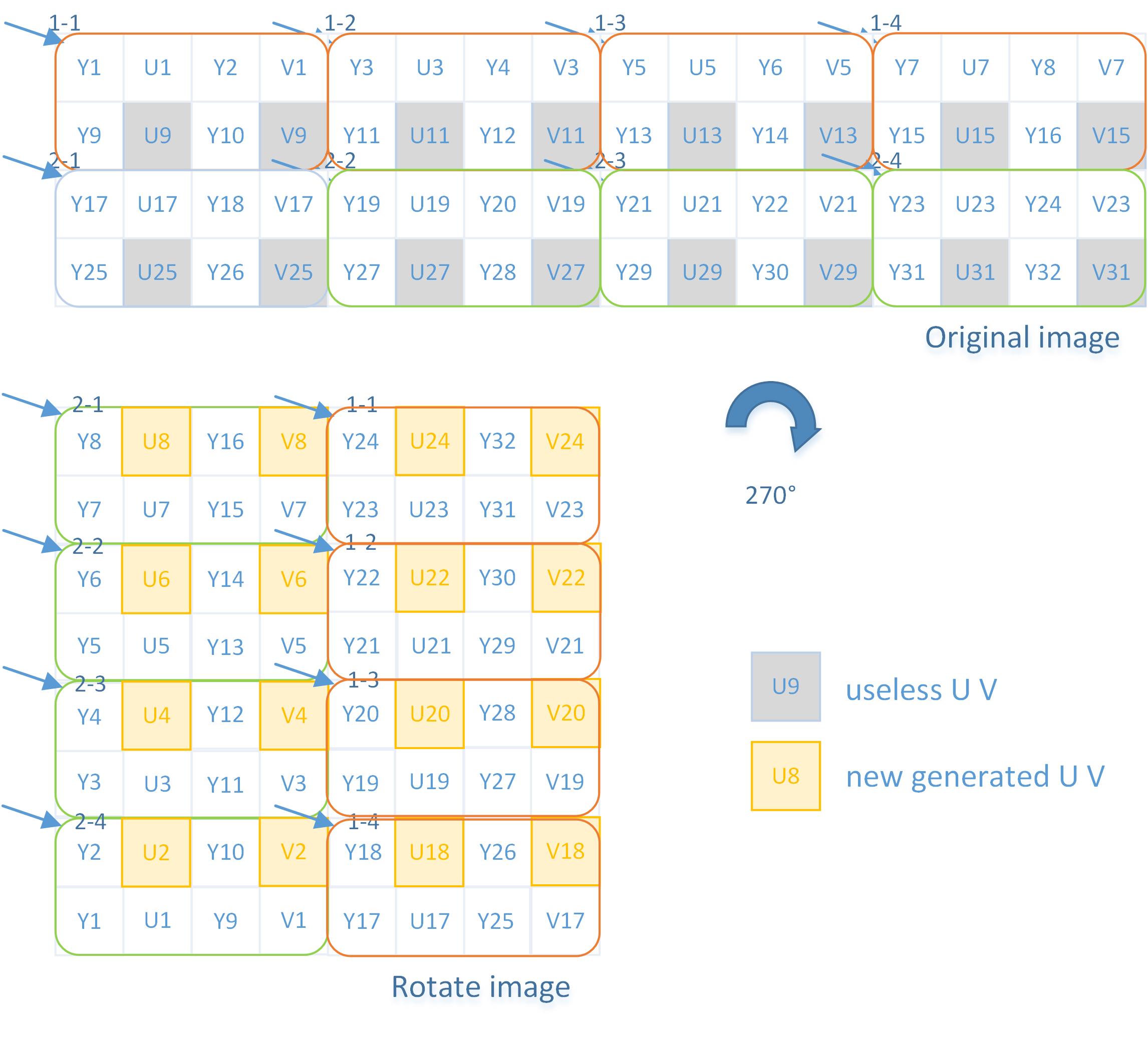
与旋转90°情况的不同在于:
- 旋转前的偶数行(以1为初始)中的UV信息都无用;
- 旋转后的奇数行(以1位初始)中的UV信息都是原图中没有的,需要推算;
- 比如,图中的U24、V24需从Y24、U23、V23转换得到,通常思路为:(Y24, U23, V23) -> (R24, G24, B24) -> (U24, V24)
旋转270°的C程序框架与90°类似,此处不赘述。
通用YUV422I旋转0/180算法
解决思路
旋转0°、180°较90°、270°更简单,仅涉及行上的像素点的转换(最少2*1个像素点)。
YUV422I旋转180°示意
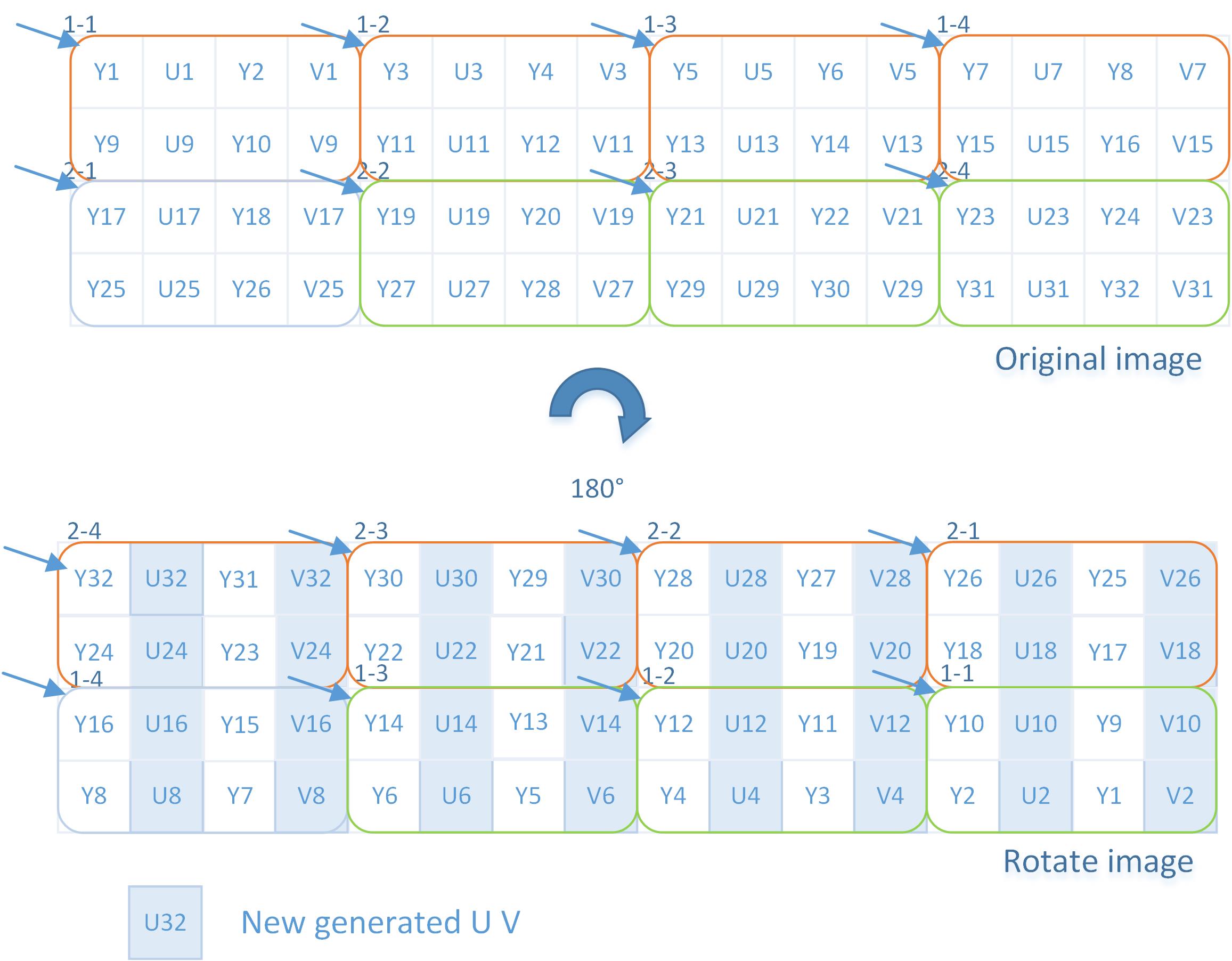
观察可发现:
- 旋转前的所有YUV信息都有用;
- 旋转后的每行Y信息逆置,UV信息则需要推算,推算思路与上述类似;
- 旋转前后的图像规格不变,仍为
(width * 2) * height;
旋转0°的本质:
- 图像数据的拷贝;
旋转180°的C程序框架:
const unsigned char *src_y = src; /* dst_1_1指向旋转前1-1处的指针 */
unsigned char *dst_y = dst_1_1; /* dst_1_1指向旋转后1-1处的指针 */
for (int i = 0; i < height; ++i) {
src = src_y;
dst = dst_y;
for (int j = 0; j < doublewidth / 4) { /* 假设一次处理每行相邻4个YUYV信息 */
// 移动Y信息
// 计算新的UV信息
src += 4; /* 更新内循环的指针 */
dst -= 4;
}
src_y += doublewidth; /* 更新外循环的指针 */
dst_y -= doublewidth;
}
完善算法以支持不规则尺寸图像的旋转
上述算法仅是一个基础版本,对于不规则的行列数的图像是不支持的,目前基本算法的局限:
- 若上述算法一次处理每行多个YUYV信息块(即大于4,如8、16、32等),则存在每行的尾数;
- 旋转90°/270°算法仅支持高度height为2的倍数;
处理问题1的思路:
可以确定的是YUV422I格式的图像的宽度一定是4的倍数(以YUYV为一组信息),因此不论一次处理每行YUYV块的个数是多少(4、8、16、32等),剩余的YUYV信息一定也是4的整数倍,故对尾数按照以4为行上一组的单位来处理。
处理问题2的思路:
YUV422I格式图像旋转90°/270°,若原图高度为奇数,则对旋转后的宽度造成影响。故此情况,需要在转换过程中进行补齐,可以直接存入255代替缺失的高度。
更加省时的图像旋转
一般地,图像呈现局部相关性,上下左右相邻的像素值相关度很高。
可以发现,旋转算法存在着不少用于计算新UV信息的计算量。但是对于性能优化来说,有时节省资源与编码效果是互补的关系,以一方的牺牲来换取另一方的提升,其实这个原则在很多地方都适用,重点在于程序要解决的主要矛盾是什么。那么,如果对图片质量的需求并不高,就将邻近的UV信息直接复制,以节省掉计算UV的时间,将会带来很大的增益。
推导证明“直接复制UV”的可行性
从推导的结果很容易发现,最终式子的系数矩阵主对角线绝对占优,因此YUV->RGB->YUV整个过程更像是YUV的直接“复制”。
下图是用“直接复制UV”的方法做的图像旋转的实验。


可以看到旋转90°后的图像除了高频部分有些杂乱模糊外(注意图中的几个圆圈字母边缘有些模糊,由于是笔者截图后的结果,所以计算机可能做了些处理,减小了前后的差异性),其他表现都不错。这证明直接复制UV的方法某种意义上也是可行的。